

Kita akan menggunakan edge detection OpenCV pada webcam yang real time. Tentu saja ini bisa diaplikasikan ke IP camera juga. Kita akan membuat script menampilkan tampilan webcam tanpa edge detection dan setelah itu kita akan mengubah sehingga menampilkan edge detection secara real time.
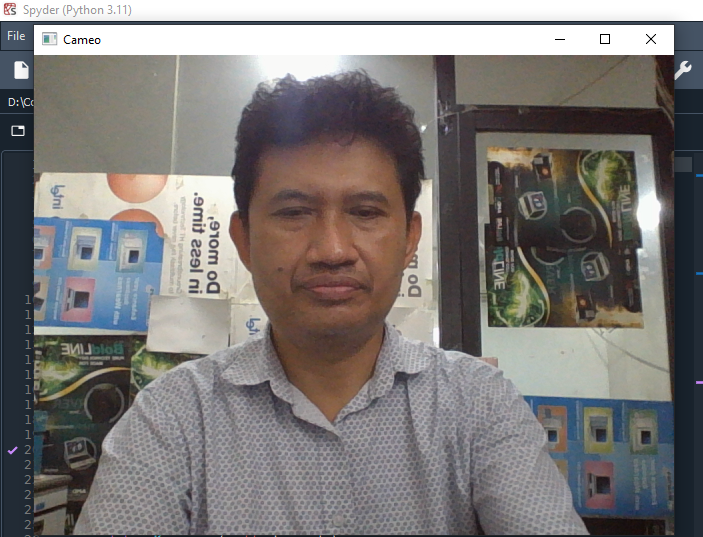
Tampilan webcam tanpa realtime edge detection adalah seperti pada berikut ini
- Source code managers.py
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107108109110111112113114115116117118119120121122123124125126127128129130131132133134135136137138139140141142143144145146147148149150151152153154155156157158159160161162163164165166167168
import cv2import numpyimport timeclassCaptureManager(object):def __init__(self, capture, previewWindowManager = None,shouldMirrorPreview = False):self.previewWindowManager = previewWindowManagerself.shouldMirrorPreview = shouldMirrorPreviewself._capture = captureself._channel = 0self._enteredFrame = Falseself._frame = Noneself._imageFilename = Noneself._videoFilename = Noneself._videoEncoding = Noneself._videoWriter = Noneself._startTime = Noneself._framesElapsed = 0self._fpsEstimate = None@propertydef channel(self):returnself._channel@channel.setterdef channel(self, value):ifself._channel != value:self._channel = valueself._frame = None@propertydef frame(self):ifself._enteredFrameandself._frame is None:_, self._frame = self._capture.retrieve(self._frame, self.channel)returnself._frame@propertydef isWritingImage(self):returnself._imageFilename is not None@propertydef isWritingVideo(self):returnself._videoFilename is not Nonedef enterFrame(self):"""Capture the next frame, if any."""# But first, check that any previous frame was exited.assert not self._enteredFrame, \'previous enterFrame() had no matching exitFrame()'ifself._capture is not None:self._enteredFrame = self._capture.grab()def exitFrame(self):"""Draw to the window. Write to files. Release the frame."""# Check whether any grabbed frame is retrievable.# The getter may retrieveandcache the frame.ifself.frame is None:self._enteredFrame = Falsereturn# Update the FPS estimateandrelated variables.ifself._framesElapsed == 0:self._startTime = time.perf_counter()else:timeElapsed = time.perf_counter() - self._startTimeself._fpsEstimate = self._framesElapsed / timeElapsedself._framesElapsed += 1# Draw to the window,ifany.ifself.previewWindowManager is not None:ifself.shouldMirrorPreview:mirroredFrame = numpy.fliplr(self._frame)self.previewWindowManager.show(mirroredFrame)else:self.previewWindowManager.show(self._frame)# Write to the image file,ifany.ifself.isWritingImage:cv2.imwrite(self._imageFilename, self._frame)self._imageFilename = None# Write to the video file,ifany.self._writeVideoFrame()# Release the frame.self._frame = Noneself._enteredFrame = Falsedef writeImage(self, filename):"""Write the next exited frame to an image file."""self._imageFilename = filenamedef startWritingVideo(self, filename,encoding = cv2.VideoWriter_fourcc('M','J','P','G')):"""Start writing exited frames to a video file."""self._videoFilename = filenameself._videoEncoding = encodingdef stopWritingVideo(self):"""Stop writing exited frames to a video file."""self._videoFilename = Noneself._videoEncoding = Noneself._videoWriter = Nonedef _writeVideoFrame(self):ifnot self.isWritingVideo:returnifself._videoWriter is None:fps = self._capture.get(cv2.CAP_PROP_FPS)ifnumpy.isnan(fps)orfps <= 0.0:# The capture's FPS is unknown sousean estimate.ifself._framesElapsed < 20:# Wait until more frames elapse so that the# estimate is more stable.returnelse:fps = self._fpsEstimatesize = (int(self._capture.get(cv2.CAP_PROP_FRAME_WIDTH)),int(self._capture.get(cv2.CAP_PROP_FRAME_HEIGHT)))self._videoWriter = cv2.VideoWriter(self._videoFilename, self._videoEncoding,fps, size)self._videoWriter.write(self._frame)classWindowManager(object):def __init__(self, windowName, keypressCallback = None):self.keypressCallback = keypressCallbackself._windowName = windowNameself._isWindowCreated = False@propertydef isWindowCreated(self):returnself._isWindowCreateddef createWindow(self):cv2.namedWindow(self._windowName)self._isWindowCreated = Truedef show(self, frame):cv2.imshow(self._windowName, frame)def destroyWindow(self):cv2.destroyWindow(self._windowName)self._isWindowCreated = Falsedef processEvents(self):keycode = cv2.waitKey(1)ifself.keypressCallback is not Noneandkeycode != -1:self.keypressCallback(keycode) - Source code cameo.py
12345678910111213141516171819202122232425262728293031323334353637383940414243444546
import cv2from managers import WindowManager, CaptureManagerclassCameo(object):def __init__(self):self._windowManager = WindowManager('Cameo',self.onKeypress)self._captureManager = CaptureManager(cv2.VideoCapture(0), self._windowManager, True)def run(self):"""Run the main loop."""self._windowManager.createWindow()whileself._windowManager.isWindowCreated:self._captureManager.enterFrame()frame = self._captureManager.frameifframe is not None:# TODO: Filter the frame (Chapter 3).passself._captureManager.exitFrame()self._windowManager.processEvents()def onKeypress(self, keycode):"""Handle a keypress.space -> Take a screenshot.tab -> Start/stop recording a screencast.escape -> Quit."""ifkeycode == 32: # spaceself._captureManager.writeImage('screenshot.png')elif keycode == 9: # tabifnot self._captureManager.isWritingVideo:self._captureManager.startWritingVideo('screencast.avi')else:self._captureManager.stopWritingVideo()elif keycode == 27: # escapeself._windowManager.destroyWindow()if__name__=="__main__":Cameo().run() - Tampilan hasil

- Source code lengkap
Source code lengkap dapat dilihat di https://github.com/PacktPublishing/Learning-OpenCV-4-Computer-Vision-with-Python-Third-Edition/tree/master/chapter02/cameo .
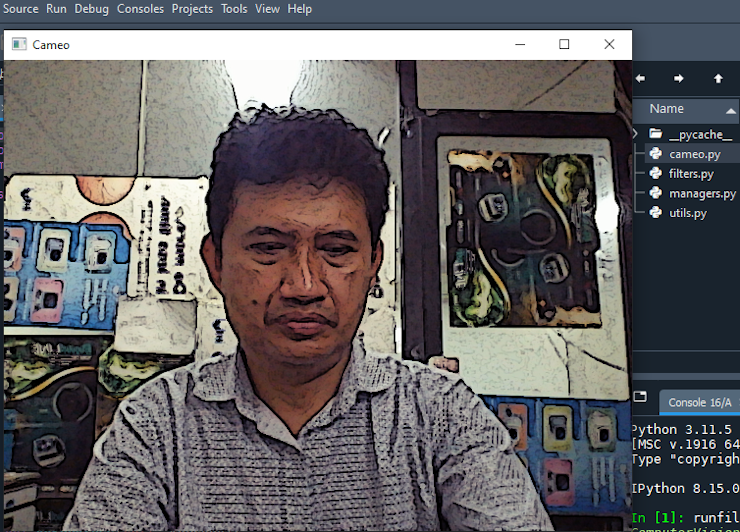
Tampilan webcam dengan realtime edge detection menggunakan OpenCV adalah seperti berikut ini
- Tambahan filters.py
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107108109110111112113114115116117118119120121122123124125126127128129130131132133134135136137138139140141142143144145146147148149150151152153154155156157158159160161162163164165166167168169170171172173174175176177178179180181182183184185186187188189190191192193194195196
import cv2import numpyimport utilsdef recolorRC(src, dst):"""Simulate conversion from BGR to RC (red, cyan).The sourceanddestination images must both be in BGR format.Bluesandgreens are replaced with cyans. The effect is similarto Technicolor Process 2 (used in early color movies)andCGAPalette 3 (used in early color PCs).Pseudocode:dst.b = dst.g = 0.5 * (src.b + src.g)dst.r = src.r"""b, g, r = cv2.split(src)cv2.addWeighted(b, 0.5, g, 0.5, 0, b)cv2.merge((b, b, r), dst)def recolorRGV(src, dst):"""Simulate conversion from BGR to RGV (red, green, value).The sourceanddestination images must both be in BGR format.Blues are desaturated. The effect is similar to TechnicolorProcess 1 (used in early color movies).Pseudocode:dst.b = min(src.b, src.g, src.r)dst.g = src.gdst.r = src.r"""b, g, r = cv2.split(src)cv2.min(b, g, b)cv2.min(b, r, b)cv2.merge((b, g, r), dst)def recolorCMV(src, dst):"""Simulate conversion from BGR to CMV (cyan, magenta, value).The sourceanddestination images must both be in BGR format.Yellows are desaturated. The effect is similar to CGA Palette 1(used in early color PCs).Pseudocode:dst.b = max(src.b, src.g, src.r)dst.g = src.gdst.r = src.r"""b, g, r = cv2.split(src)cv2.max(b, g, b)cv2.max(b, r, b)cv2.merge((b, g, r), dst)def blend(foregroundSrc, backgroundSrc, dst, alphaMask):# Calculate the normalized alpha mask.maxAlpha = numpy.iinfo(alphaMask.dtype).maxnormalizedAlphaMask = (1.0 / maxAlpha) * alphaMask# Calculate the normalized inverse alpha mask.normalizedInverseAlphaMask = \numpy.ones_like(normalizedAlphaMask)normalizedInverseAlphaMask[:] = \normalizedInverseAlphaMask - normalizedAlphaMask# Split the channels from the sources.foregroundChannels = cv2.split(foregroundSrc)backgroundChannels = cv2.split(backgroundSrc)# Blend each channel.numChannels = len(foregroundChannels)i = 0whilei < numChannels:backgroundChannels[i][:] = \normalizedAlphaMask * foregroundChannels[i] + \normalizedInverseAlphaMask * backgroundChannels[i]i += 1# Merge the blended channels into the destination.cv2.merge(backgroundChannels, dst)def strokeEdges(src, dst, blurKsize=7, edgeKsize=5):ifblurKsize >= 3:blurredSrc = cv2.medianBlur(src, blurKsize)graySrc = cv2.cvtColor(blurredSrc, cv2.COLOR_BGR2GRAY)else:graySrc = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)cv2.Laplacian(graySrc, cv2.CV_8U, graySrc, ksize=edgeKsize)normalizedInverseAlpha = (1.0 / 255) * (255 - graySrc)channels = cv2.split(src)forchannel in channels:channel[:] = channel * normalizedInverseAlphacv2.merge(channels, dst)classVFuncFilter(object):"""A filter that applies a function to V (or all of BGR)."""def __init__(self, vFunc=None, dtype=numpy.uint8):length = numpy.iinfo(dtype).max + 1self._vLookupArray = utils.createLookupArray(vFunc, length)def apply(self, src, dst):"""Apply the filter with a BGR or gray source/destination."""srcFlatView = numpy.ravel(src)dstFlatView = numpy.ravel(dst)utils.applyLookupArray(self._vLookupArray, srcFlatView,dstFlatView)classVCurveFilter(VFuncFilter):"""A filter that applies a curve to V (or all of BGR)."""def __init__(self, vPoints, dtype=numpy.uint8):VFuncFilter.__init__(self, utils.createCurveFunc(vPoints),dtype)classBGRFuncFilter(object):"""A filter that applies different functions to each of BGR."""def __init__(self, vFunc=None, bFunc=None, gFunc=None,rFunc=None, dtype=numpy.uint8):length = numpy.iinfo(dtype).max + 1self._bLookupArray = utils.createLookupArray(utils.createCompositeFunc(bFunc, vFunc), length)self._gLookupArray = utils.createLookupArray(utils.createCompositeFunc(gFunc, vFunc), length)self._rLookupArray = utils.createLookupArray(utils.createCompositeFunc(rFunc, vFunc), length)def apply(self, src, dst):"""Apply the filter with a BGR source/destination."""b, g, r = cv2.split(src)utils.applyLookupArray(self._bLookupArray, b, b)utils.applyLookupArray(self._gLookupArray, g, g)utils.applyLookupArray(self._rLookupArray, r, r)cv2.merge([b, g, r], dst)classBGRCurveFilter(BGRFuncFilter):"""A filter that applies different curves to each of BGR."""def __init__(self, vPoints=None, bPoints=None,gPoints=None, rPoints=None, dtype=numpy.uint8):BGRFuncFilter.__init__(self,utils.createCurveFunc(vPoints),utils.createCurveFunc(bPoints),utils.createCurveFunc(gPoints),utils.createCurveFunc(rPoints), dtype)classBGRCrossProcessCurveFilter(BGRCurveFilter):"""A filter that applies cross-process-like curves to BGR."""def __init__(self, dtype=numpy.uint8):BGRCurveFilter.__init__(self,bPoints=[(0,20),(255,235)],gPoints=[(0,0),(56,39),(208,226),(255,255)],rPoints=[(0,0),(56,22),(211,255),(255,255)],dtype=dtype)classBGRPortraCurveFilter(BGRCurveFilter):"""A filter that applies Portra-like curves to BGR."""def __init__(self, dtype=numpy.uint8):BGRCurveFilter.__init__(self,vPoints=[(0,0),(23,20),(157,173),(255,255)],bPoints=[(0,0),(41,46),(231,228),(255,255)],gPoints=[(0,0),(52,47),(189,196),(255,255)],rPoints=[(0,0),(69,69),(213,218),(255,255)],dtype=dtype)classBGRProviaCurveFilter(BGRCurveFilter):"""A filter that applies Provia-like curves to BGR."""def __init__(self, dtype=numpy.uint8):BGRCurveFilter.__init__(self,bPoints=[(0,0),(35,25),(205,227),(255,255)],gPoints=[(0,0),(27,21),(196,207),(255,255)],rPoints=[(0,0),(59,54),(202,210),(255,255)],dtype=dtype)classBGRVelviaCurveFilter(BGRCurveFilter):"""A filter that applies Velvia-like curves to BGR."""def __init__(self, dtype=numpy.uint8):BGRCurveFilter.__init__(self,vPoints=[(0,0),(128,118),(221,215),(255,255)],bPoints=[(0,0),(25,21),(122,153),(165,206),(255,255)],gPoints=[(0,0),(25,21),(95,102),(181,208),(255,255)],rPoints=[(0,0),(41,28),(183,209),(255,255)],dtype=dtype)classVConvolutionFilter(object):"""A filter that applies a convolution to V (or all of BGR)."""def __init__(self, kernel):self._kernel = kerneldef apply(self, src, dst):"""Apply the filter with a BGR or gray source/destination."""cv2.filter2D(src, -1, self._kernel, dst)classBlurFilter(VConvolutionFilter):"""A blur filter with a 2-pixel radius."""def __init__(self):kernel = numpy.array([[0.04, 0.04, 0.04, 0.04, 0.04],[0.04, 0.04, 0.04, 0.04, 0.04],[0.04, 0.04, 0.04, 0.04, 0.04],[0.04, 0.04, 0.04, 0.04, 0.04],[0.04, 0.04, 0.04, 0.04, 0.04]])VConvolutionFilter.__init__(self, kernel)classSharpenFilter(VConvolutionFilter):"""A sharpen filter with a 1-pixel radius."""def __init__(self):kernel = numpy.array([[-1, -1, -1],[-1, 9, -1],[-1, -1, -1]])VConvolutionFilter.__init__(self, kernel)classFindEdgesFilter(VConvolutionFilter):"""An edge-finding filter with a 1-pixel radius."""def __init__(self):kernel = numpy.array([[-1, -1, -1],[-1, 8, -1],[-1, -1, -1]])VConvolutionFilter.__init__(self, kernel)classEmbossFilter(VConvolutionFilter):"""An emboss filter with a 1-pixel radius."""def __init__(self):kernel = numpy.array([[-2, -1, 0],[-1, 1, 1],[ 0, 1, 2]])VConvolutionFilter.__init__(self, kernel) - Tambahan utils.py
1234567891011121314151617181920212223242526272829303132333435363738394041424344
import cv2import numpyimport scipy.interpolatedef createLookupArray(func, length=256):"""Return a lookupforwhole-number inputs to afunction.The lookup values are clamped to [0, length - 1]."""iffunc is None:returnNonelookupArray = numpy.empty(length)i = 0whilei < length:func_i = func(i)lookupArray[i] = min(max(0, func_i), length - 1)i += 1returnlookupArraydef applyLookupArray(lookupArray, src, dst):"""Map a source to a destination using a lookup."""iflookupArray is None:returndst[:] = lookupArray[src]def createCurveFunc(points):"""Return a function derived from control points."""ifpoints is None:returnNonenumPoints = len(points)ifnumPoints < 2:returnNonexs, ys = zip(*points)ifnumPoints < 3:kind ='linear'elif numPoints < 4:kind ='quadratic'else:kind ='cubic'returnscipy.interpolate.interp1d(xs, ys, kind,bounds_error = False)def createCompositeFunc(func0, func1):"""Return a composite of two functions."""iffunc0 is None:returnfunc1iffunc1 is None:returnfunc0returnlambda x: func0(func1(x)) - Pengubahan source code cameo.py
123456789101112131415161718192021222324252627282930313233343536373839
import cv2import filtersfrom managers import WindowManager, CaptureManagerclassCameo(object):def __init__(self):self._windowManager = WindowManager('Cameo',self.onKeypress)self._captureManager = CaptureManager(cv2.VideoCapture(0), self._windowManager, True)self._curveFilter = filters.BGRPortraCurveFilter()def run(self):"""Run the main loop."""self._windowManager.createWindow()whileself._windowManager.isWindowCreated:self._captureManager.enterFrame()frame = self._captureManager.frameifframe is not None:filters.strokeEdges(frame, frame)self._curveFilter.apply(frame, frame)self._captureManager.exitFrame()self._windowManager.processEvents()def onKeypress(self, keycode):"""Handle a keypress.space -> Take a screenshot.tab -> Start/stop recording a screencast.escape -> Quit."""ifkeycode == 32: # spaceself._captureManager.writeImage('screenshot.png')elif keycode == 9: # tabifnot self._captureManager.isWritingVideo:self._captureManager.startWritingVideo('screencast.avi')else:self._captureManager.stopWritingVideo()elif keycode == 27: # escapeself._windowManager.destroyWindow()if__name__=="__main__":Cameo().run()Pada bagian ini perhatikan bagian self._curveFilter
123456def __init__(self):self._windowManager = WindowManager('Cameo',self.onKeypress)self._captureManager = CaptureManager(cv2.VideoCapture(0), self._windowManager, True)self._curveFilter = filters.BGRPortraCurveFilter()dan if frame is not None
123456789def run(self):"""Run the main loop."""self._windowManager.createWindow()whileself._windowManager.isWindowCreated:self._captureManager.enterFrame()frame = self._captureManager.frameifframe is not None:filters.strokeEdges(frame, frame)self._curveFilter.apply(frame, frame) - Tampilan hasil
- Source lengkap
Source lengkap dapat dilihat di https://github.com/PacktPublishing/Learning-OpenCV-4-Computer-Vision-with-Python-Third-Edition/tree/master/chapter03/cameo .
Kunjungi www.proweb.co.id untuk menambah wawasan anda.
Real Time Edge Detection dengan OpenCV